
This article explains how to set the values in the Connecting Parameters tab of the ‘Properties’ dialog box for FFlex bodies. A quick summary of the discussion below is:
- Generally, selecting (checking the box) the ‘Use Force Connector’ option provides faster simulation and better convergence.
- For a more precise calculation, it is recommended to uncheck the ‘Use Force Connector’ option.
Background
When creating a joint between a rigid body and a FFlex body, the joint doesn’t connect those two bodies directly. To improve the performance of solver, RecurDyn creates a virtual rigid body that is referred to as the ‘Connecting Body’ between the rigid body and the FFlex body, as shown below.
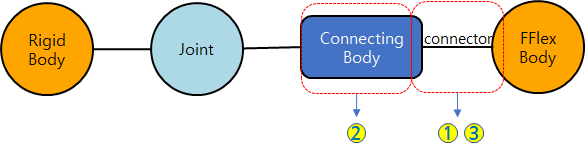
The parameters related to this connecting body can be set in the ‘Connecting Parameters’ tab of the ‘Properties’ dialog box.
The numbers in the figure above refer to specific sections in the dialog box as shown here:
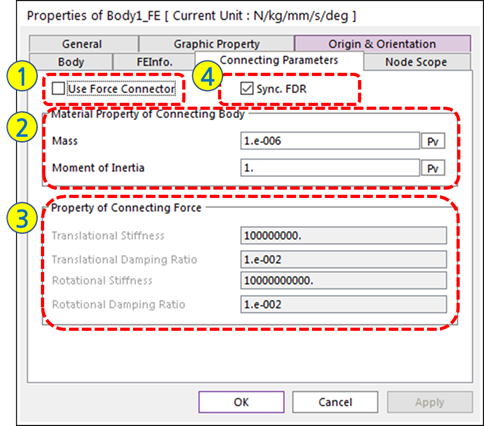
Descriptions of each parameter
1. Use Force Connector: this option sets the connection method between the Connecting Body and the FFlex Body:
- When the box is checked (on), it is referred to as “Force Type.” The Connector is treated as a force (such as a bushing force). This option tends to have better simulation speed and convergency. However, please keep in mind that the connecting body is not absolutely fixed to the FFlex Body because the force entity has a stiffness. With this option there can be relative displacement even when a fixed joint connects the connecting body to the FFlex body. Given that the default stiffness is very high, the relative displacement is very small and the bodies will seem to be fixed.
- When the box is unchecked (off), it is referred to as “Constraint Type.” The Connector is treated as a fixed joint, and since the number of constrained degrees-of-freedom (DOFs) increase, the simulation speed can become slower. The advantage is that the relative position of the connecting body and the FFlex body is absolutely fixed.
2. Material Property of Connecting Body
- These values can be thought of as the mass properties of the connecting body. The default values of the connecting body mass and moment of inertia are very small to minimize the influence of the connecting body on the behavior of the remainder of the assembly.
- If all of the bodies in the model are very light it is recommended that the mass properties of the Connecting Body be changed to be 1,000,000 times lower than the mass properties of the smallest body in the connection.
3. Property of Connecting Force
- These are the stiffness and damping properties of the virtual connector and are only meaningful when ‘Use Force Connector’ is checked on.
4. Sync. FDR
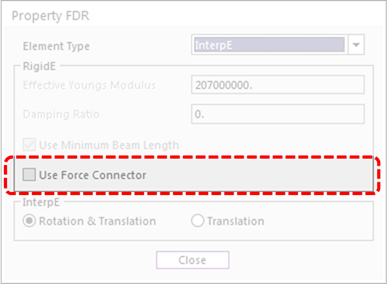
- When the box is checked (on), All FDRs (Force-Distributing Rigid Elements, known as RBEs in the FEA world) in the FFlex Body use the settings of the ‘Use Force Connector’ section. Generally, you can use the default setting (on). If you uncheck this option, you can change the setting of each FDR element using the FDR element properties dialog box, as shown:
In summary, setting Use Force Connector = ON)’ is recommended to improve the simulation speed or convergency. But, if strict control of the relative displacement between bodies is desired, use the ‘Constraint Type (Use Force Connector = OFF)’. Please note that beginning with RecurDyn V9R3 that the Constraint Type is the default setting.
If you have any uncertainty about with method to use, run your first simulation with ‘Constraint Type’ then run your second simulation with ‘Force Type’. Compare the accuracy and simulation speed to decide which option you need to use. Also, please remember to adjust the mass and moment of inertia of the connecting body when the bodies in your model are very light so that the connecting body does not overly influence the results of your model.