















Basics of Modal Flexible Body Simulation
Review of RecurDyn/DriveTrain
RecurDyn/DriveTrain defines and simulates drivetrain components, including gears, bearings, and shafts (see toolkit icons in the figure). Users can easily simulate and analyze drivetrain systems with specialized user interfaces, a specialized solver, and dedicated post-processing.
The GearKS and BearingKS toolkits have been developed through a technical partnership with Gleason’s KISSsoft, and offers KISSsoft’s Gear Analytic Contact and tens of thousands of gear and bearing libraries. This allows RecurDyn users to accurately calculate a variety of results including transmission error for noise and vibration evaluation.
Gear Contact elements in RecurDyn/DriveTrain
In the GearKS toolkit the contact between gears is referred to as a gear force. GearKS supports 3 gear force types as shown in the image below: Inactivate, KISSsoft Force, and KISSsoft Force (Meta Model). These contacts are explained below, with a focus on the meta model option, because it is expected to be used frequently.

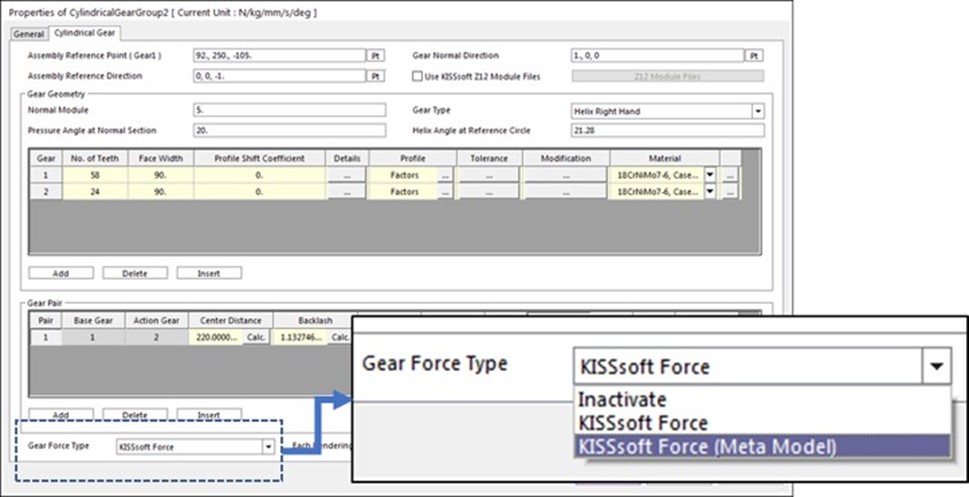
Gear Force Types
Inactivate – If this type is selected, GearKS doesn’t calculate the gear contact. Instead, other contacts such as a gear involute contact or a geo contact must be defined. To use gear involute contact, first set the Gear Force Type to Inactivate and then create the gear involute contact using the RecurDyn/Gear Toolkit (different than the GearKS toolkit).
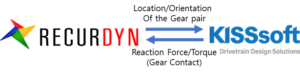 KISSsoft Force – The gear contact is calculated by the co-simulation between RecurDyn and the embedded KISSsoft solver. Each time step, RecurDyn transfers the updated position of the gears to KISSsoft and the KISSsoft solver embedded in RecurDyn calculates the gear contact. The reaction force/torque is transferred from KISSsoft to RecurDyn.
KISSsoft Force – The gear contact is calculated by the co-simulation between RecurDyn and the embedded KISSsoft solver. Each time step, RecurDyn transfers the updated position of the gears to KISSsoft and the KISSsoft solver embedded in RecurDyn calculates the gear contact. The reaction force/torque is transferred from KISSsoft to RecurDyn.
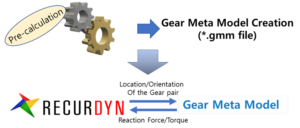
KISSsoft Force (Meta Model) – This method is generally recommended because it is very fast and has high accuracy. Unlike the KISSsoft Force (Direct Co-Simulation) option, KISSsoft Force (Meta Model) uses the pre-calculated Gear Meta Model in the simulation, which is the reason for its speed. The Gear Meta Model (*.gmm file) must be created using up to 6 parameters which are related to the location/ orientation of the gear pair before simulation. The generation of the Gear Meta Model requires from several minutes to several hours. The Gear Meta Model is reusable if the same gear pair is used for another model. The same Gear Meta Model can be used for the several gear pairs in the same model.
More About the Gear Meta Model
In general, meta models are also known as surrogate models, or approximate models. A meta model is prepared by running a series of analyses with varied values for some number of gear-related variables. The outputs of all of these analysis runs are used to construct an N-dimensional response surface that quickly predicts the outputs of interest as a function of a specific input case. Using the response surface, you can quickly obtain gear contact results that accurately consider transmission errors because the surface is generated from accurate KISSsoft gear contact data. The gear meta model is generated with a set of static analyses and the meta model data is stored in a *.gmm file.
The 6 gear variables that may be considered include Rotational Angle (most important), Penetration, Distance Error, Axial Offset, Twist, and Tilt. These variables are described in the figure below.
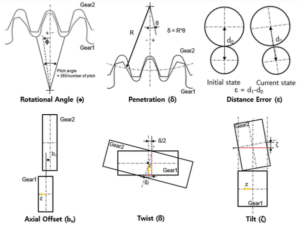
The default setting uses only 2 parameters: Rotational Angle and Penetration. The accurate simulation of gear vibrations requires an accurate calculation of the change in meshing stiffness. The meshing stiffness of a gear varies with several factors, and rotation is the most important variable for high-accuracy gear contact.
If the gears are constrained by revolute joints, the Distance Error, Twist, and Tilt parameters can be ignored. The Axial Offset can be ignored in many cases. Nonetheless, for the most accurate result, it is recommended to use all 6 parameters. The time to generate a Gear Meta Model (varies depending on the system) is as low as several minutes when 2 parameters are used but may require several hours when all 6 parameters are used.
Choosing the Right Contact Type for Your Model

Please refer to the table.
The KISSsoft Force (Meta Model) is recommended in most cases because of its high accuracy and speed. Even though it takes time to generate Gear Meta Model, Gear Meta Model is reusable. Another reason to use KISSsoft Force (Meta Model) is if the gear specification is already fixed.
While the KISSsoft Force (Direct) is a little more accurate, the benefit of faster simulation speed (>50x) with the KISSsoft Force (Meta Model) compensates for the slight loss of the accuracy. If you only need to run 1 or 2 simulations then the KISSsoft Force (Direct) option can be a good choice.
The Gear Involute Contact is a good choice if the focus of the model is on macro system behavior rather than the micro effects such as the transmission error or the effect of the micro geometry of the gear. Gear Involute Contact is very convenient because no pre-calculation is needed.
If you need to simulate a flexible gear then you should use the Geo Surface Contact because the KISSsoft Force and Gear Involute contacts don’t support flexible bodies.
Calculation of Mass Properties When merging bodies with different materials
When you merge rigid bodies using the Merge Body command, the mass properties of the merged body are automatically calculated and applied, using one of two methods. The first method described below is used when the “User Input in Material Input” option (highlighted in the figure) is not checked and the second method is used when this option is checked.
First Option: Use the physical properties of the target body 
The mass properties of the merged body are based on the total solid volume and assuming the material type of the Target Body.
For example, let’s assume that the Target Body is Steel and that Body B (Aluminum) is merged into it. The newly merged body has a material type of steel and the mass properties are calculated on the total solid volume. On the other hand, if body B were the target body, the material type of the resulting body would be aluminum. Given this behavior, this option is only appropriate when merging bodies of the same material.
Second Option: User Input in Material Input
After calculating the mass and moment of inertia from each of the Source Bodies, combine their mass properties with the mass properties of the target body. Set the mass properties of the target body with these combined properties, using the Material Type mode of “User Input” in the body properties. In summary, use this option when merging bodies with different material types in order to obtain accurate mass properties for the combined body.